




Silnik podwodny 24V~36V, wodoodporny, o ciągu 7kg~9kg
Opis
Podwodny silnik bezszczotkowy SW4025 o napięciu 24–36 V DC został zaprojektowany specjalnie do podwodnych dronów/robotów. Ten model nie posiada śmigła, użytkownicy mogą zaprojektować własne śmigło i zamocować je za pomocą śrub.
Jest to zwykły silnik bezszczotkowy, który można napędzać dowolnym zwykłym kontrolerem drona ESC lub zwykłym kontrolerem silnika bezszczotkowego.
Piękny kształt, długa żywotność, technologia niskiego poziomu hałasu, wysoki wskaźnik oszczędności energii, wysoki moment obrotowy i wysoka precyzja.
Jest szeroko stosowany w precyzyjnym sprzęcie elektronicznym, sprzęcie automatyki, sprzęcie wodnym i podwodnym, modelach samolotów, dronach i inteligentnych robotach.
Przed złożeniem zamówienia upewnij się, że potrafisz zaprojektować śmigło.
Parametry
| Typ silnika | Podwodny silnik bezszczotkowy |
| Waga | 310g |
| Podwodny ciąg | 7 kg~9 kg |
| Napięcie znamionowe | 24~36 V |
| Wartość KV | 200~300 |
| Prędkość rozładunku | 7000 |
| Moc znamionowa | 450~800 W |
| Prąd obciążenia | 15~23A |
| Moment znamionowy | 0,9 N*m |
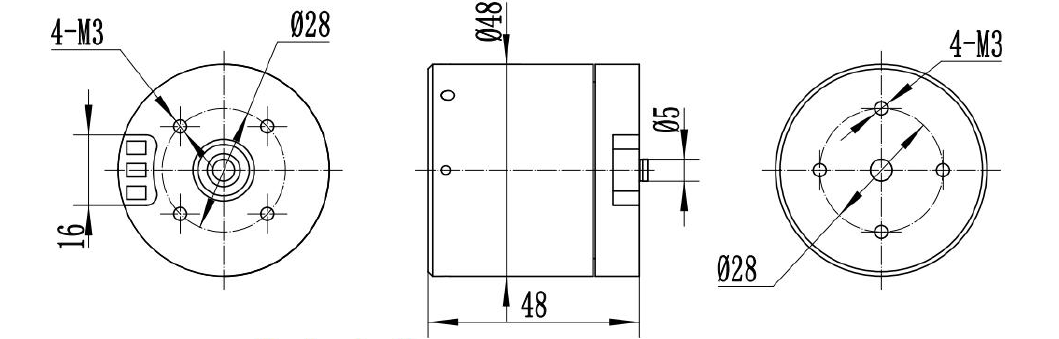
Rysunek projektowy: Otwory na śruby na górze służące do mocowania śmigła
O silnikach podwodnych
Ponieważ silnik bezszczotkowy wykorzystuje komutację elektroniczną, jego działanie wymaga dostosowania się do napięcia prądu stałego silnika, sterownika (ESC) oraz sygnału sterującego prędkością.
Weźmy na przykład typowy model regulatora prędkości (ESC). Najpierw odłącz zasilanie, podłącz przewody silnika i sygnał prędkości, ustaw przepustnicę w najwyższym położeniu (pełny cykl pracy). Podłącz zasilanie. Usłyszysz dwa dźwięki „opadnięcia”. Przepustnica szybko opadnie do najniższego położenia, a następnie usłyszysz dźwięk „opadnięcia – opadnięcia” oznaczający normalny rozruch silnika. Kalibracja przepustnicy jest zakończona i możesz normalnie uruchomić silnik. (Tryb pracy regulatora prędkości może się różnić w zależności od producenta. Szczegółowe informacje można znaleźć w instrukcji obsługi danego modelu regulatora lub u producenta regulatora).
Klienci mogą wykorzystać do napędzania tego silnika zwykły dron ESC (elektryczny układ kontroli prędkości).
Zajmujemy się wyłącznie produkcją silników. Nie oferujemy regulatorów prędkości.
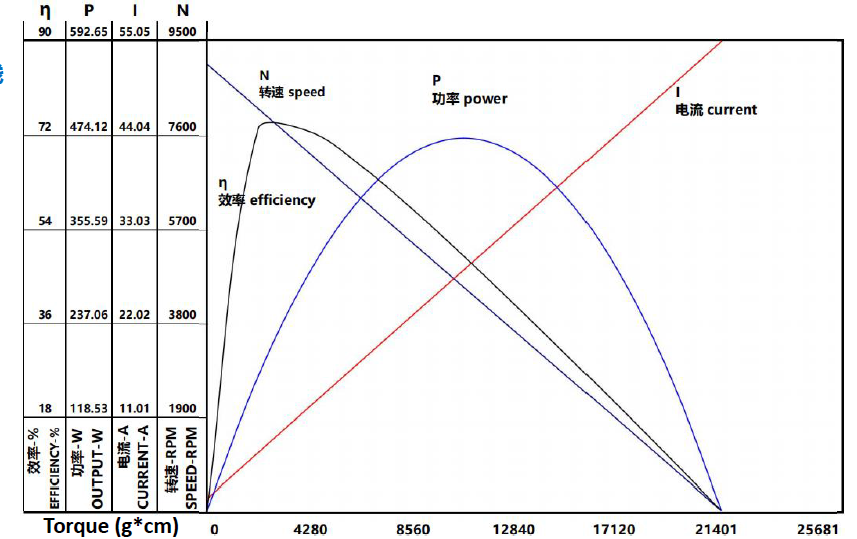
Krzywa wydajności silnika SW2216 (16 V, 550 kV)
Zalety silnika podwodnego
1. Wodoodporność i odporność na wilgoć zapobiegają zwarciom elementów elektrycznych wewnątrz komory.
2. Skuteczne blokowanie pyłu i cząstek, zapobiegające zużyciu łożysk.
3. Utrzymuj komorę w stanie suchym, aby zapobiec korozji i utlenianiu silnika, co mogłoby skutkować słabym kontaktem lub wyciekiem.
Aplikacje
●Precyzyjny instrument elektroniczny
●Sprzęt automatyki
●Sprzęt podwodny
●Model samolotu Dron
●Inteligentny robot
Oś wyjściowa
1. Sposób okablowania
Przede wszystkim silnik, zasilacz i regulator powinny zostać dobrane dokładnie do obciążenia i warunków użytkowania. Zbyt wysokie napięcie zasilania może uszkodzić silnik i regulator, a moc rozładowania zasilacza jest niewystarczająca, aby silnik osiągnął moc znamionową i wpłynąć na działanie efektu. Dobór regulatora powinien być również dopasowany do napięcia znamionowego silnika. Śruby montażowe silnika nie powinny być zbyt długie, aby nie uszkodzić cewki silnika. Przed podłączeniem, dla bezpieczeństwa, należy odłączyć obciążenie silnika, najpierw podłączyć regulator i silnik trzema przewodami (trzy przewody można zamienić dwoma, aby zmienić kierunek obrotów silnika), a następnie podłączyć przewód sygnałowy regulatora, zwracając uwagę na kolejność okablowania przewodu sygnałowego, nie podłączać odwrotnie. Na koniec podłączyć zasilanie prądem stałym, biegunowość dodatnia i ujemna nie mogą zostać odwrócone. Większość regulatorów ESC dostępnych na rynku ma zabezpieczenie przed odwrotnym przewodem. Brak zabezpieczenia przed odwrotnym przewodem w regulatorach ESC, biegunowość dodatnia i ujemna zasilania stwarza ryzyko przepalenia.
2. Kalibracja skoku przepustnicy.
Jeśli używasz regulatora ESC po raz pierwszy, zmieniasz źródło sygnału PWM lub przez dłuższy czas używasz sygnału przepustnicy niezgodnie ze skalibrowaniem, musisz skalibrować zakres przepustnicy.
Informacje o czasie realizacji i pakowaniu
Czas realizacji próbek:
Silniki standardowe dostępne w magazynie: w ciągu 3 dni
Silniki standardowe niedostępne w magazynie: w ciągu 15 dni
Produkty dostosowane do indywidualnych potrzeb: około 25–30 dni (w zależności od stopnia skomplikowania dostosowania)
Czas realizacji budowy nowej formy: zazwyczaj około 45 dni
Czas realizacji produkcji masowej: zależny od wielkości zamówienia
Opakowanie
Próbki pakowane są w gąbkę piankową i papierowe pudełko, wysyłane ekspresowo
Produkcja masowa, silniki pakowane są w tekturowe kartony z zewnętrzną przezroczystą folią. (wysyłka drogą lotniczą)
W przypadku wysyłki drogą morską produkt będzie pakowany na paletach

OpakowanieSposób i czas dostawy
| DHL | 3-5 dni roboczych |
| UPS | 5-7 dni roboczych |
| TNT | 5-7 dni roboczych |
| FedEx | 7-9 dni roboczych |
| Pogotowie ratunkowe | 12-15 dni roboczych |
| Poczta Chińska | Zależy od kraju, do którego statek płynie |
| Morze | Zależy od kraju, do którego statek płynie |

metoda płatności
| metoda płatności | Karta Mastercard | Wiza | e-Checking | PŁAĆ PÓŹNIEJ | T/T | Paypal |
| Czas realizacji zamówienia próbki | około 15 dni | |||||
| Czas realizacji zamówień hurtowych | 25-30 dni | |||||
| gwarancja jakości produktów | 12 miesięcy | |||||
| Opakowanie | opakowanie jednostkowe kartonowe, 500 sztuk w pudełku. | |||||
Wyślij nam swoją wiadomość:
Kategorie produktów
-

cichy, wysokiej jakości mikrosilnik krokowy 3,3 V 6 mm...
-

Wał śrubowy M3, 2 fazy, 10 mm, mini przekładnia, stopień...
-

Silnik szczotkowy prądu stałego N20 z przekładnią 1024, wyjście ...
-

Silnik krokowy o wysokiej precyzji 42 mm NEMA 17 hybrydowy...
-

Cichy, stopniowy przetwornik z magnesami trwałymi o średnicy 50 mm...
-

Silnik krokowy hybrydowy NEMA 23 o wysokim momencie obrotowym, 57 mm m...