.jpg)
.jpg)
.jpg)
.jpg)
Hybrydowy silnik krokowy Nema 11 (28 mm), bipolarny, 4-wyprowadzeniowy, śruba pociągowa ACME, niski poziom hałasu, długa żywotność, wysoka wydajność.
Hybrydowy silnik krokowy Nema 11 (28 mm), bipolarny, 4-wyprowadzeniowy, śruba pociągowa ACME, niski poziom hałasu, długa żywotność, wysoka wydajność.
Ten hybrydowy silnik krokowy o średnicy 28 mm jest dostępny w trzech wersjach: z napędem zewnętrznym, z osią przelotową i z osią przelotową stałą. Możesz wybrać odpowiedni do swoich potrzeb.
Maksymalny nacisk do 240 kg, niski wzrost temperatury, niskie wibracje, niski poziom hałasu, długa żywotność (do 5 milionów cykli) i wysoka dokładność pozycjonowania (do ±0,01 mm)
Rysunek poglądowy standardowego silnika zewnętrznego VSM28HSM:
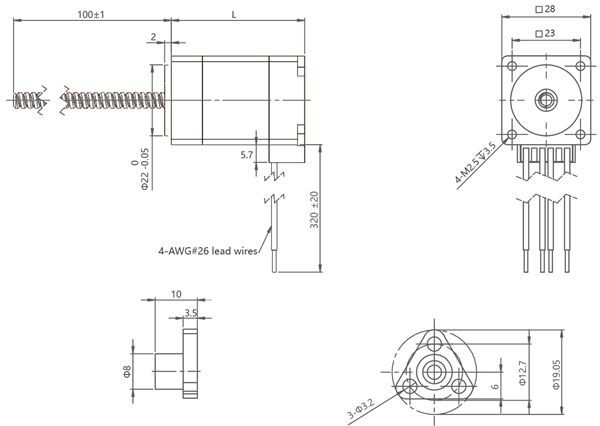
Uwagi:
Długość śruby pociągowej można dostosować
Na końcu śruby pociągowej możliwa jest obróbka dostosowana do indywidualnych potrzeb
Opisy
| Nazwa produktu | 20 mm Hybrydowe silniki krokowe z napędem zewnętrznym |
| Model | VSM20HSM |
| Typ | hybrydowe silniki krokowe |
| Kąt kroku | 1,8° |
| Napięcie (V) | 2,5 / 6,3 |
| Prąd (A) | 0,5 |
| Rezystancja (Ohm) | 5,1 / 12,5 |
| Indukcyjność (mH) | 1,5 / 4,5 |
| Przewody doprowadzające | 4 |
| Moment trzymania (Nm) | 0,02 / 0,04 |
| Długość silnika (mm) | 30 / 42 |
| Temperatura otoczenia | -20℃ ~ +50℃ |
| Wzrost temperatury | Maks. 80 tys. |
| Wytrzymałość dielektryczna | Maks. 1 mA przy 500 V, 1 kHz, 1 sek. |
| Rezystancja izolacji | 100MΩ min. przy 500Vdc |
Certyfikaty

Parametry elektryczne:
| Rozmiar silnika | Woltaż/ Faza (V) | Aktualny/ Faza (A) | Opór/ Faza (Ω) | Indukcyjność/ Faza (mH) | Liczba Przewody doprowadzające | Bezwładność wirnika (g.cm2) | Moment trzymania (Nm) | Długość silnika L (mm) |
| 20 | 2,5 | 0,5 | 5.1 | 1,5 | 4 | 2 | 0,02 | 30 |
| 20 | 6.3 | 0,5 | 12,5 | 4.5 | 4 | 3 | 0,04 | 42 |
Ogólne parametry techniczne:
| Luz promieniowy | 0,02 mm maks. (obciążenie 450 g) | Rezystancja izolacji | 100MΩ przy 500VDC |
| Luz osiowy | 0,08 mm maks. (obciążenie 450 g) | Wytrzymałość dielektryczna | 500 V AC, 1 mA, 1 s przy 1 kHz |
| Maksymalne obciążenie promieniowe | 15N (20 mm od powierzchni kołnierza) | Klasa izolacji | Klasa B (80 tys.) |
| Maksymalne obciążenie osiowe | 5N | Temperatura otoczenia | -20℃ ~ +50℃ |
Specyfikacja śrub:
| Średnica śruby pociągowej (mm) | Ołów (mm) | Krok (mm) | Siła samoblokowania przy wyłączaniu (N) |
| 3.5 | 0,6096 | 0,003048 | 80 |
| 3.5 | 1 | 0,005 | 40 |
| 3.5 | 2 | 0,01 | 10 |
| 3.5 | 4 | 0,02 | 1 |
| 3.5 | 8 | 0,04 | 0 |
Krzywa momentu obrotowego i częstotliwości
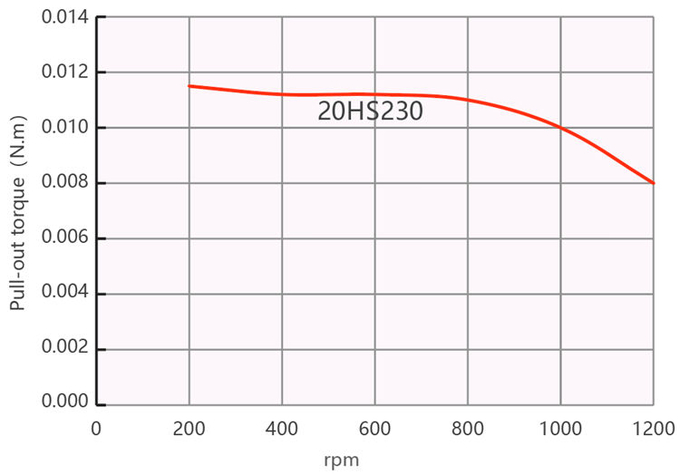
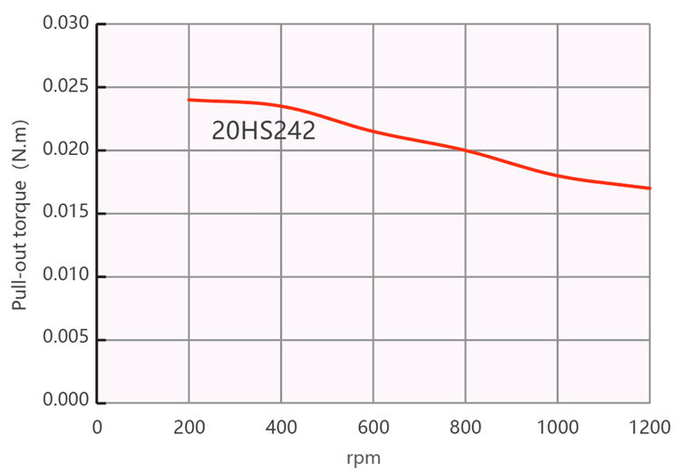
Warunki testu:
Napęd siekacza, półmikrokrokowy, napięcie napędu 24V
Obszary zastosowań
Drukowanie 3D:Hybrydowe silniki krokowe o średnicy 20 mm można stosować do sterowania ruchem w drukarkach 3D, do napędzania głowicy drukującej, platformy i układu ruchu osiowego.
Urządzenia automatyki: Silniki krokowe są powszechnie stosowane w urządzeniach automatyki, takich jak automatyczne maszyny pakujące, automatyczne linie montażowe, automatyczne ramiona robotów transportowych itp., w celu precyzyjnego kontrolowania położenia i prędkości.
Robotyka:W dziedzinie robotyki hybrydowe silniki krokowe 20 mm są stosowane do sterowania ruchami stawów robotów, co pozwala na dokładną kontrolę położenia i postawy.
Obrabiarki CNC:Tego typu silniki krokowe stosuje się również w obrabiarkach CNC do sterowania precyzyjnymi ruchami narzędzi lub stołów w celu wykonania obróbki o wysokiej precyzji.
Sprzęt medyczny:W sprzęcie medycznym hybrydowe silniki krokowe 20 mm mogą być stosowane do dokładnego sterowania ruchem podzespołów sprzętu medycznego, na przykład robotów chirurgicznych i systemów dostarczania leków.
Sprzęt samochodowy:W przemyśle motoryzacyjnym silniki krokowe można stosować do sterowania położeniem i ruchem podzespołów samochodowych, na przykład systemów podnoszenia i opuszczania szyb, systemów regulacji siedzeń itp.
Inteligentny dom:W dziedzinie inteligentnych domów hybrydowe silniki krokowe 20 mm mogą być stosowane do sterowania otwieraniem i zamykaniem zasłon, obracaniem kamer w domowych systemach bezpieczeństwa itp.
To tylko niektóre z typowych obszarów zastosowań hybrydowych silników krokowych 20 mm. Silniki krokowe znajdują szerokie zastosowanie w różnych branżach i dziedzinach. Konkretne scenariusze zastosowania zależą również od ich konkretnych specyfikacji, wydajności i wymagań dotyczących sterowania.
Korzyść
Dokładność i możliwość pozycjonowania:Silniki krokowe hybrydowe zapewniają wysoką dokładność i możliwość pozycjonowania, umożliwiając wykonywanie precyzyjnych ruchów krokowych, często przy niewielkich kątach kroku, np. 1,8 stopnia lub 0,9 stopnia, co przekłada się na dokładniejszą kontrolę położenia.
Wysoki moment obrotowy i duża prędkość:Hybrydowe silniki krokowe zostały zaprojektowane tak, aby zapewniać wysoki moment obrotowy i, przy odpowiednim sterowniku i kontrolerze, wysoką prędkość. Dzięki temu nadają się do zastosowań wymagających zarówno wysokiego momentu obrotowego, jak i dużej prędkości ruchu.
Sterowalność i programowalność:Hybrydowe silniki krokowe to układy sterowania w pętli otwartej o wysokiej sterowalności. Mogą być precyzyjnie sterowane na każdym etapie ruchu przez sterownik, co zapewnia wysoce programowalne i sterowalne sekwencje ruchu.
Prosta obsługa i sterowanie:Hybrydowe silniki krokowe charakteryzują się stosunkowo prostym układem napędowym i sterującym w porównaniu z innymi typami silników. Nie wymagają stosowania układów sprzężenia zwrotnego położenia (np. enkoderów) i mogą być bezpośrednio sterowane przez odpowiednie sterowniki i kontrolery. Upraszcza to projektowanie i instalację systemu oraz obniża koszty.
Wysoka niezawodność i stabilność:Hybrydowe silniki krokowe oferują wysoką niezawodność i stabilność dzięki prostej konstrukcji, niewielkiej liczbie ruchomych części i bezszczotkowej konstrukcji. Nie wymagają regularnej konserwacji, charakteryzują się długą żywotnością i zapewniają stabilną pracę przy prawidłowym użytkowaniu i eksploatacji.
Energooszczędny i cichy:Hybrydowe silniki krokowe są energooszczędne, zapewniając wysoki moment obrotowy przy stosunkowo niskim poborze mocy. Ponadto zazwyczaj generują niższy poziom hałasu, co daje im przewagę w zastosowaniach wrażliwych na hałas.
Wymagania dotyczące wyboru silnika:
►Kierunek ruchu/montażu
►Wymagania dotyczące obciążenia
►Wymagania dotyczące udaru mózgu
►Wymagania dotyczące obróbki końcowej
►Wymagania dotyczące precyzji
►Wymagania dotyczące informacji zwrotnej z kodera
►Wymagania dotyczące ręcznej regulacji
►Wymagania środowiskowe
Warsztat produkcyjny



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)