.jpg)
.jpg)
.jpg)
.jpg)
Hybrydowy silnik krokowy Nema 34 (86 mm), bipolarny, 4-żyłowy, śruba pociągowa ACME, niski poziom hałasu, długa żywotność, sprzęt formiczny
Opis
Ten hybrydowy silnik krokowy o średnicy 86 mm jest dostępny w trzech wersjach: z napędem zewnętrznym, z osią przelotową i z osią przelotową stałą. Możesz wybrać odpowiedni do swoich potrzeb.
Silnik krokowy ACME ze śrubą pociągową zamienia ruch obrotowy na ruch liniowy za pomocą śruby pociągowej. Śruba pociągowa ma różne kombinacje średnic i skoku, aby spełnić wymagania różnych zastosowań.
Silnik krokowy ze śrubą pociągową jest zwykle używany w zastosowaniach wymagających precyzyjnego ruchu liniowego, niskiego poziomu hałasu i wysokiej opłacalności, np. w sprzęcie medycznym, urządzeniach telekomunikacyjnych itp.
ThinkerMotion oferuje pełną gamę silników krokowych ze śrubą pociągową (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) o zakresie obciążenia od 30 N do 2400 N, w 3 typach (zewnętrzny, zabezpieczony i niezabezpieczony). Na życzenie klienta możliwe są modyfikacje, takie jak długość i końcówka śruby, hamulec magnetyczny, enkoder, nakrętka antyluzowa itp. Śruba pociągowa może być również pokryta teflonem.

Opisy
| Nazwa produktu | Silniki krokowe hybrydowe 86 mm |
| Model | VSM86HSM |
| Typ | hybrydowe silniki krokowe |
| Kąt kroku | 1,8° |
| Napięcie (V) | 3/4,8 |
| Prąd (A) | 6 |
| Rezystancja (Ohm) | 0,5/0,8 |
| Indukcyjność (mH) | 4/8,5 |
| Przewody doprowadzające | 4 |
| Długość silnika (mm) | 76/114 |
| Temperatura otoczenia | -20℃ ~ +50℃ |
| Wzrost temperatury | Maks. 80 tys. |
| Wytrzymałość dielektryczna | Maks. 1 mA przy 500 V, 1 kHz, 1 sek. |
| Rezystancja izolacji | 100MΩ min. przy 500Vdc |
Certyfikaty

Parametry elektryczne:
| Rozmiar silnika | Woltaż /Faza (V) | Aktualny /Faza (A) | Opór /Faza (Ω) | Indukcyjność /Faza (mH) | Liczba Przewody doprowadzające | Bezwładność wirnika (g.cm2) | Masa silnika (G) | Długość silnika L (mm) |
| 86 | 3 | 6 | 0,5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0,8 | 8,5 | 4 | 2500 | 5000 | 114 |
Specyfikacje i parametry wydajnościowe śruby pociągowej
| Średnica (mm) | Ołów (mm) | Krok (mm) | Siła samoblokująca wyłączająca zasilanie (N) |
| 15.875 | 2,54 | 0,0127 | 2000 |
| 15.875 | 3,175 | 0,015875 | 1500 |
| 15.875 | 6,35 | 0,03175 | 200 |
| 15.875 | 12.7 | 0,0635 | 50 |
| 15.875 | 25.4 | 0,127 | 20 |
Uwaga: Aby uzyskać więcej specyfikacji śrub pociągowych, skontaktuj się z nami.
Rysunek poglądowy standardowego silnika zewnętrznego VSM86HSM
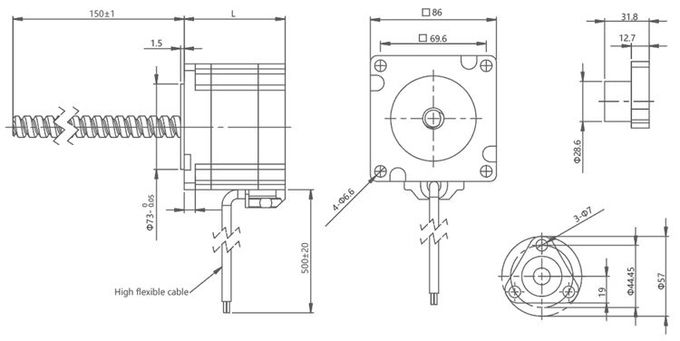
Uwagi:
Długość śruby pociągowej można dostosować
Na końcu śruby pociągowej możliwa jest obróbka dostosowana do indywidualnych potrzeb
Rysunek poglądowy standardowego silnika krokowego hybrydowego 86 mm:
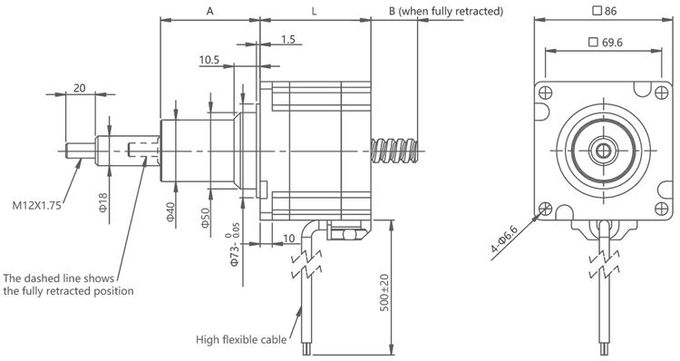
Uwagi:
Na końcu śruby pociągowej możliwa jest obróbka dostosowana do indywidualnych potrzeb
| Udar S (mm) | Wymiar A (mm) | Wymiar B (mm) | |
| Dł. = 76 | L = 114 | ||
| 12.7 | 29,7 | 0 | 0 |
| 19.1 | 36.1 | 2.1 | 0 |
| 25.4 | 42.4 | 8.4 | 0 |
| 31,8 | 48,8 | 14.8 | 0 |
| 38.1 | 55.1 | 21.1 | 0 |
| 50,8 | 67,8 | 33,8 | 0 |
| 63,5 | 80,5 | 46,5 | 8,5 |
Rysunek poglądowy standardowego silnika krokowego hybrydowego o średnicy 86 mm i stałym przelotowym mocowaniu
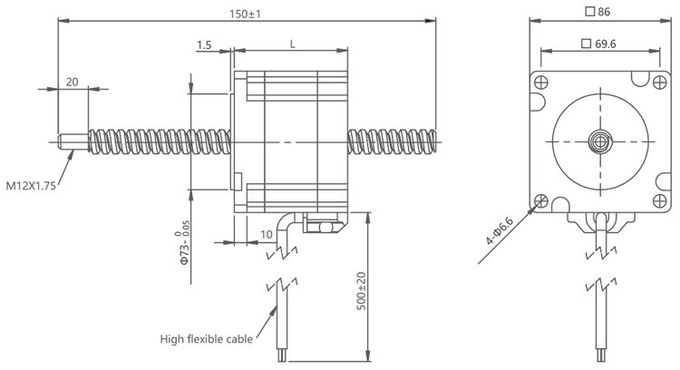
Uwagi:
Długość śruby pociągowej można dostosować
Na końcu śruby pociągowej możliwa jest obróbka dostosowana do indywidualnych potrzeb
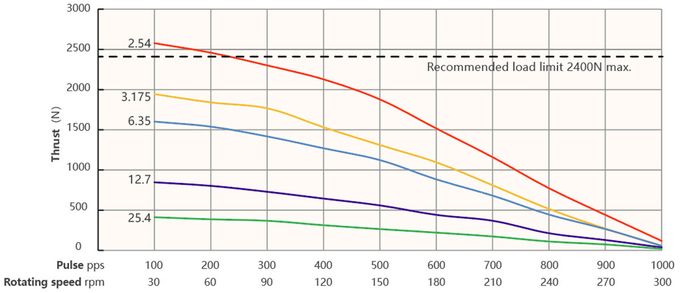
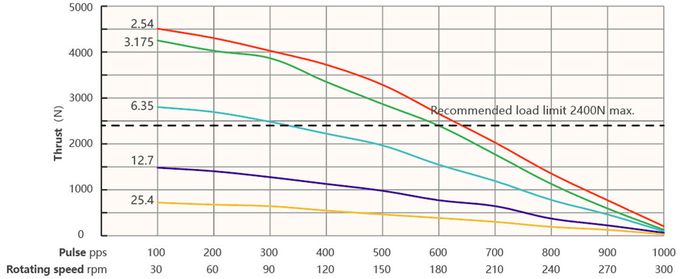
Krzywa prędkości i ciągu:
Silnik bipolarny serii 86 o długości 76 mm z napędem siekającym
100% częstotliwości impulsów prądu i krzywej ciągu (śruba pociągowa Φ15,88 mm)
Silnik bipolarny serii 86 o długości 114 mm z napędem siekającym
100% częstotliwości impulsów prądu i krzywej ciągu (śruba pociągowa Φ15,88 mm)
| Ołów (mm) | Prędkość liniowa (mm/s) | |||||||||
| 2,54 | 1.27 | 2,54 | 3.81 | 5.08 | 6,35 | 7,62 | 8,89 | 10.16 | 11.43 | 12.7 |
| 3,175 | 1,5875 | 3,175 | 4,7625 | 6,35 | 7.9375 | 9,525 | 11.1125 | 12.7 | 14.2875 | 15.875 |
| 6,35 | 3,175 | 6,35 | 9,525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 | 31,75 |
| 12.7 | 6,35 | 12.7 | 19.05 | 25.4 | 31,75 | 38.1 | 44,45 | 50,8 | 57,15 | 63,5 |
| 25.4 | 12.7 | 25.4 | 38.1 | 50,8 | 63,5 | 76,2 | 88,9 | 101,6 | 114,3 | 127 |
Warunki testu:
Napęd siekacza, bez rampy, półmikrokrokowy, napięcie napędu 40 V
Obszary zastosowań
Obrabiarki CNC:Silniki krokowe hybrydowe o średnicy 86 mm są powszechnie stosowane w obrabiarkach CNC do sterowania ruchem i położeniem narzędzi skrawających, co pozwala na realizację operacji obróbki o wysokiej precyzji.
Sprzęt automatyki:Silniki krokowe hybrydowe 86 mm mogą być stosowane w różnych urządzeniach automatyki, takich jak automatyczne maszyny pakujące, automatyczne systemy sortujące, automatyczne linie produkcyjne itp., w celu sterowania ruchem i pozycjonowaniem.
Drukowanie 3D:W dziedzinie druku 3D do kontrolowania położenia i ruchu głowicy drukującej stosuje się hybrydowe silniki krokowe o średnicy 86 mm, co pozwala na realizację precyzyjnych operacji drukowania.
Urządzenia medyczne:Silniki krokowe hybrydowe o średnicy 86 mm są powszechnie stosowane w urządzeniach medycznych, takich jak pompy strzykawkowe, roboty medyczne, sprzęt do skanowania medycznego itp. w celu precyzyjnej kontroli położenia i ruchu.
Sprzęt telekomunikacyjny:Silniki krokowe hybrydowe 86 mm mogą być stosowane do precyzyjnego pozycjonowania i kontroli urządzeń telekomunikacyjnych, takich jak systemy pozycjonowania anten komunikacyjnych czy precyzyjne sterowanie urządzeniami światłowodowymi.
Maszyny włókiennicze:W przemyśle tekstylnym hybrydowe silniki krokowe 86 mm można stosować do sterowania maszynami przędzalniczymi, krosnami i innym sprzętem, gwarantując dokładność i stabilność procesu tekstylnego.
Robotyka:Hybrydowe silniki krokowe o średnicy 86 mm mogą być stosowane w różnych zastosowaniach robotyki, w tym robotach przemysłowych, robotach usługowych, robotach współpracujących itp., zapewniając precyzję ruchów i działania.
Zautomatyzowane systemy magazynowe:W zautomatyzowanych systemach magazynowania i logistyki hybrydowe silniki krokowe 86 mm mogą być stosowane do sterowania taśmociągami, windami, układarkami i innymi urządzeniami w celu uzyskania dokładnego pozycjonowania i obsługi przedmiotów.
Korzyść
Płynny i precyzyjny ruch:Hybrydowe silniki krokowe o średnicy 86 mm zapewniają płynny i precyzyjny ruch dzięki wbudowanej rozdzielczości kroku. Pozwala to na precyzyjne pozycjonowanie i płynny ruch, redukując ryzyko wibracji i gwarantując wysoką jakość działania.
Wysoki moment obrotowy przy niskich prędkościach:Hybrydowe silniki krokowe zapewniają wysoki moment obrotowy nawet przy niskich prędkościach, dzięki czemu nadają się do zastosowań wymagających dużego momentu obrotowego przytrzymującego lub rozruchowego. Ta cecha jest szczególnie korzystna w sytuacjach, gdy silnik musi utrzymać pozycję pomimo działania sił zewnętrznych.
Szeroki zakres rozdzielczości kroków:Hybrydowe silniki krokowe o średnicy 86 mm oferują szeroki zakres rozdzielczości kroków, umożliwiając precyzyjną kontrolę ruchu. Dzięki wykorzystaniu techniki mikrokroków, silnik może dzielić każdy krok na mniejsze podkroki, co przekłada się na płynniejszy ruch i większą dokładność pozycjonowania.
Łatwość sterowania i obsługi: Hybrydowe silniki krokowe charakteryzują się prostą architekturą sterowania i napędu, zazwyczaj wykorzystującą sygnały impulsowe i kierunkowe. Dzięki temu można je łatwo zintegrować z różnymi systemami sterowania, co zmniejsza złożoność i czas projektowania.
Wysoka niezawodność i trwałość:Hybrydowe silniki krokowe 86 mm znane są ze swojej wytrzymałości i długiej żywotności. Mogą wytrzymać trudne warunki pracy, takie jak wahania temperatury i naprężenia mechaniczne, bez uszczerbku dla wydajności.
Rozwiązanie ekonomiczne:Hybrydowe silniki krokowe oferują ekonomiczne rozwiązanie w porównaniu z innymi technologiami sterowania ruchem, takimi jak serwosilniki. Zapewniają one dobry balans między wydajnością a ceną, dzięki czemu nadają się do zastosowań, w których ważny jest budżet.
Wszechstronne zastosowania:Hybrydowe silniki krokowe o średnicy 86 mm znajdują zastosowanie w różnych branżach, takich jak robotyka, automatyka, produkcja, druk 3D, sprzęt medyczny i wiele innych. Ich wszechstronność pozwala na ich wykorzystanie w szerokim zakresie zastosowań wymagających precyzyjnego pozycjonowania i kontroli.
Wymagania dotyczące wyboru silnika:
►Kierunek ruchu/montażu
►Wymagania dotyczące obciążenia
►Wymagania dotyczące udaru mózgu
►Wymagania dotyczące obróbki końcowej
►Wymagania dotyczące precyzji
►Wymagania dotyczące informacji zwrotnej z kodera
►Wymagania dotyczące ręcznej regulacji
►Wymagania środowiskowe
Warsztat produkcyjny


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)